Jachty dostępne w ofertach firm czarterowych nie zawsze wyposażone są w wysokiej jakości i bezawaryjnie działającą nawigację GPS. Bywa, że podczas rejsu ploter map ulega awarii, stawiając nas w fatalnym położeniu – szczególnie jeśli żeglujemy po trudnym i nieznanym sobie akwenie.
Tutaj z pomocą przychodzą mobilne aplikacje nawigacyjne. To coraz bardziej popularna alternatywa dla stacjonarnych ploterów pokładowych, ponieważ dokładność i funkcjonalność aplikacji dorównuje już profesjonalnym systemom nawigacji morskiej. Aplikacje nawigacyjne potrzebują sygnału GNSS (np. GPS), ale nie wymagają dostępu do Internetu – mapy i niektóre dane locji (szczegółowe opisy znaków nawigacyjnych, świateł, miejsc niebezpiecznych, plany podejściowe portów itp.) przechowywane są w pamięci tabletu lub smartfona.
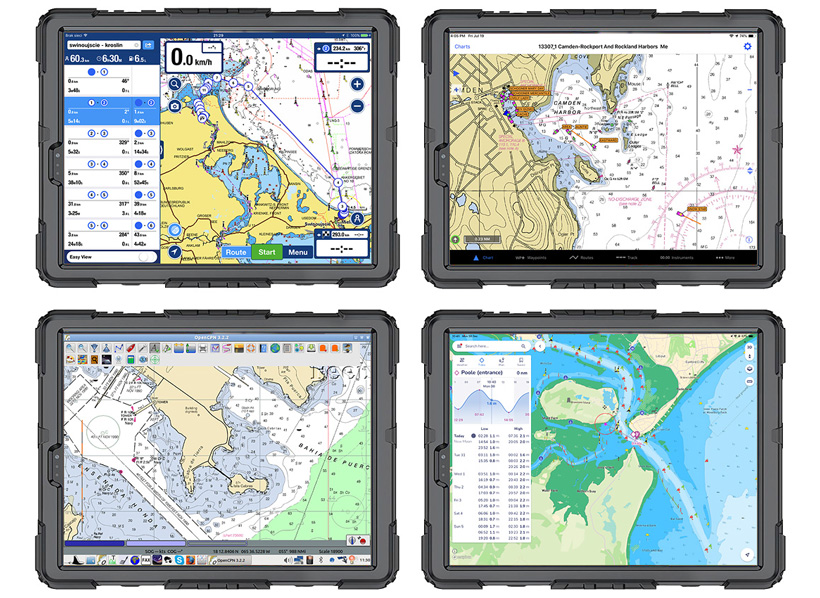
Na rynku istnieje wiele marek i wariantów tego oprogramowania, jak Savvy Navvy, iNavX czy OpenCPN, ale niekwestionowanym liderem jest tu Navionics Boating (Garmin). Ta zapewniająca kompleksowe dane nawigacyjne i łatwa w obsłudze aplikacja wyróżnia się na tle innych niezwykle szczegółowymi mapami morskimi i wysoką rozdzielczością batymetrii (dane o głębokościach).
Navionics Boating pozwala na planowanie tras, śledzenie lokalizacji, mierzenie odległości i tworzenie punktów trasy, a nawet monitorowanie celów AIS (Automatic Identification System). Kiedy urządzenie, na którym zainstalowany jest Navionics, odnajduje sygnał Wi-Fi lub dostęp do danych komórkowych, aplikacja pobiera m.in. aktualne dane pogodowe, w tym informacje o sile i kierunku wiatru, prądach i pływach.
Niewątpliwym atutem aplikacji jest aktywność ogromnej społeczności ActiveCaptain Community, która stale aktualizuje i ulepsza mapy, dane locji oraz inne zasoby Navionics.